// parametres
h =0.2;
L =1;
// Definition des points: stem:[(x, y, z)] et taille de l'element /
Point (1)={0,0,0,h};
Point (2)={L,0,0,h};
Point (3)={L,L,0,h};
Point (4)={0,L,0,h};
// Definition des lignes
Line (1)={1,2};
Line (2)={2,3};
Line (3)={3,4};
Line (4)={4,1};
// Definition de la surface
Line Loop (5)={1,2,3,4} ;
Plane Surface (10)={5};
Physical Line ("Dirichlet")={1,2,3,4};
Physical Surface ("Omega")={10};Programmation de la méthode
Christophe Prud'homme <christophe.prudhomme@cemosis.fr>, Laurent Navoret
Gmsh
Gmsh (logiciel libre): https://gmsh.info
Création de maillage élément finis \(2 \mathrm{D} / 3 \mathrm{D}\)
Interface graphique
| différentes versions (version 2 / version 4 ) |
Exemple
Créer un fichier carre. geo
Exemple
commande pour générer le fichier .geo
gmsh carre.geoPour générer le maillage :
Mesh / 2DPour générer le fichier gmsh :
File / Save meshPour changer la couleur:
Tools / General / Color / Predefined color scheme / DarkPour afficher le numéro des noeuds:
Tools / Mesh / Visibility / Node IabelsPour afficher le numéro des éléments \(2 \mathrm{D}\) :
Tools / Mesh / Visibility / 2D element IabelsCréation d’un fichier msh en ligne de commande:
gmsh -2 -order 1 carre.geo -o carre.mshFichier .msh
$MeshFormat
4 0 8
$EndMeshFormat
$Entities
4 4 1 0
1 0 0 0 0 0 0 0 // Point 1
2 1 0 0 1 0 0 0 // Point 2
3 1 1 0 1 1 0 0 // Point 3
4 0 1 0 0 1 0 0 // Point 4
1 0 0 0 1 0 0 0 2 1 -2 // Line 1 entre Point 1 et Point 2
2 1 0 0 1 1 0 0 2 2 -3 // Line 2 entre Point 2 et Point 3
3 0 1 0 1 1 0 0 2 3 -4 // Line 3 ...
4 0 0 0 0 1 0 0 2 4 -1 // Line 4 ...
1 0 0 0 1 1 0 1 1 4 1 2 3 4 // Line 5
$EndEntitiesFichier .msh
$Nodes
9 45
1 0 0 1 // Point 1
1 0 0 0
2 0 0 1 // Point 2
2 1 0 0
3 0 0 1 // Point 3
3 1 1 0
4 0 0 1 // Point 4
4 0 1 0
1 1 0 4 // Line 1
5 0.1999999999995579 0 0
6 0.3999999999989749 0 0
7 0.5999999999989468 0 0
8 0.7999999999994734 0 0
2 1 0 4 // Line 2
9 1 0.1999999999995579 0
10 1 0.3999999999989749 0
11 1 0.5999999999989468 0
12 1 0.7999999999994734 0
3 1 0 4 // Line 3
13 0.7999999999999998 1 0
14 0.6000000000013869 1 0
15 0.4000000000016644 1 0
16 0.2000000000008322 1 0
4 1 0 4 // Line 4
17 0 0.7999999999999998 0
18 0 0.6000000000013869 0
19 0 0.4000000000016644 0
20 0 0.2000000000008322 0
1 2 0 25 // Surface 1
21 0.7124999999991418 0.7124999999993721 0
22 0.7125000000000453 0.2875000000003787 0
.....
$EndNodesFichier .msh (fin)
$Elements
1 68
1 2 2 68 // 68 triangles
1 21 43 29 // triangle 1 avec noeuds 21 , 43 et 29
2 29 43 33
3 41 29 35
....
$EndElementsvient de
Physical Surface(1) = {1};sans cette instruction : toutes les Elementary entities sont décrites
pour marquer les bords, on peut ajouter dans le code
.geo
Physical Line (11) = {1 ,3};
Physical Line (12) = {2 ,4};Autres commandes
Maillage triangulaire structuré
Transfinite surface {1};Maillage quadrangulaire
Recombine surface {1};Maillage 3D par extrusion
Extrude {0 ,1. ,1.5}{ Surface {1}; Layers {3}; Recombine ;}Assemblage de la matrice
\[\begin{aligned}
A_{i, j} &=\int_{\Omega} \nabla \varphi_{i} \cdot \nabla \varphi_{j} \\
&=\sum_{K \subset \operatorname{supp} \varphi_{i} \cap \operatorname{supp} \varphi_{j}} \int_{K} \nabla \varphi_{i} \cdot \nabla \varphi_{j} \\
&=\sum_{K \subset \operatorname{supp} \varphi_{i} \cap \operatorname{supp} \varphi_{j}} \int_{K} \nabla \psi_{K, \hat{\imath}} \cdot \nabla \psi_{K, \hat{\jmath}}
\end{aligned}\]
| La plupart des intégrales sont nulles par construction, il suffit alors de parcourir les éléments \(K\) du maillage et de rajouter les contribution sur chaque élément à la matrice \(A\) grâce à la propriété d’aditivité de l’intégrale. |
Matrice de connectivité:
La paire \((K,\hat{\imath})\) fournit la numérotation locale de la fonction de base et \(i\) la numérotation globale. La relation entre les deux numérotation est donnée par la matrice de connectivité ou table des dégrés de liberté
\[\mbox{connect}\left(\text {ind}_{K}, \hat{\imath}\right)=i\]
le couple de fonctions de base \(\psi_{K,\hat{\imath}}, \psi_{K, \hat{\jmath}}\) contribue au terme \(A_{i, j}\) avec \(i=\mbox{connect}\left(\text {ind}_{K}, \hat{\imath}\right)\) et \(j=\mbox{connect}\left(\text {ind}_{K}, \hat{\jmath}\right)\)
principe de l’assemblage : calculer les termes \(\int_{K} \nabla \psi_{K, \hat{\imath}} \cdot \nabla \psi_{K, \hat{\jmath}}\) et les ajouter au fur et à mesure dans la matrice.
Assemblage de la matrice
- Rappel
Changement de variable \(T: V \rightarrow U\) un \(C^{1}\) difféomorphisme
\[\int_{U} f(x) d x=\int_{V} f(T(y))|\operatorname{det}(\nabla T(y))| d y\]- Calcul des coefficients
- \[\int_{K} \nabla \psi_{K, \hat{\imath}} \cdot \nabla \psi_{K, \hat{\imath}}=\int_{\hat{K}} \nabla \psi_{K, \hat{\jmath}}\left(T_{K}(y)\right) \cdot \nabla \psi_{K, \hat{\jmath}}\left(T_{K}(y)\right)\left|\operatorname{det}\left(\nabla T_{K}(x)\right)\right| d y\]
avec \(i=\mbox{connect}(K,\hat{\imath})\), \(j=\mbox{connect}(K,\hat{\jmath})\);
Assemblage de la matrice
- Proposition
- \[\nabla \psi_{K, \hat{\imath}}\left(T_{K}(y)\right)=\nabla \hat{\psi}_{\hat{\imath}} \nabla T_{K}(y)^{-T}\]
On a \(\psi_{K, \hat{\imath}}(x)=\hat{\psi}_{\hat{\imath}}\left(T_{K}^{-1}(x)\right)\) donc \(\nabla \psi_{\hat{\imath}}(x)=\nabla \hat{\psi}_{\hat{\imath}}\left(T_{K}^{-1}(x)\right) \nabla T_{K}^{-T}(x)\) puis \(\nabla \psi_{\hat{\imath}}\left(T_{K}(y)\right)=\nabla \hat{\psi}_{\hat{\imath}}(y) \nabla T_{K}^{-T}\left(T_{K}(y)\right) .\) Puis \(\nabla T_{K}^{-T}\left(T_{K}(y)\right) \nabla T_{K}(y)=I d\)
| Si \(T_{K} \text { affine } \Rightarrow \nabla T_{K}(y) \text { matrice constante (indép. de } x\) |
| Les Formules de quadratures sont construites sur \(\hat{K}\) |
Transformation géométrique
\[\hat{X} = (\hat{x}_0,\ldots,\hat{x}_{d-1})^T : \mbox{point dans} \hat{K} \subset \mathbb{R}^d\\
\hat{X}_i = (\hat{x}_{i,0},\ldots,\hat{x}_{i,d-1})^T: \mbox{ sommets de } \hat{K}\\
X_i = (x_{i,0},\ldots,x_{i,d-1})^T = T_K(\hat{X}_i), \quad i=1 \ldots d+1 \mbox{ sommets de K}\\
X = (x_{0},\ldots,x_{d-1})^T = T_K(\hat{X}), \quad \mbox{point de K}\\
\psi_i \mbox{ ieme fonction de base de Lagrange sur } \hat{K} \mbox{ associée à } \hat{x}_i\\
x_j = T_K(\hat{x})_j = \sum_{i=1}^{d+1} x_{i,j} \psi_i(\hat{x}), \quad j=0\ldots d-1\\
\hat{\nabla} T_K(\hat{x}) = (\hat{\nabla} T_K (\hat{x})_0, \ldots, \hat{\nabla} T_K (\hat{x})_{d-1} ) \quad \mbox{ indep de } \hat{x}\\
\mbox{calcul } |\mathrm{det} \nabla T_K |, \quad \mbox{calcul } \nabla T_K ^{-1}\\\]
Formule de quadrature
- Definition
Soit \(K\) polygone et \(n \in \mathbb{N}^{*} .\) On considère
\[Q(\phi)=\sum_{i=1}^{n} \omega_{i} \phi\left(\xi_{i}\right) \quad \approx \int_{K} \phi(x) d x\]
\(\left(\xi_{i}\right) \in K^{n}:\) points de quadrature
\(\left(\omega_{i}\right) \in \mathbb{R}^{n}:\) poids de quadrature
Ordre de quadrature
C’est le plus grand entier \(m \in \mathbb{N}\) tel que l’intégrale soit exacte sur \(\mathbb{P}_{m}\)
- Estimation d’erreur
\(\exists c>0\) telle que \(\forall \phi \in C^{m+1}(K)\)
\[\left|\sum_{i=1}^{n} \omega_{i} \phi\left(\xi_{i}\right)-\int_{K} \phi(x) d x\right| \leqslant c \operatorname{mes}(K) h_{K}^{m+1}\|\phi\|_{C^{m+1}(K)}\]
\(\operatorname{mes}(K):=\) volume de \(K\)
Formule de quadrature
Cas du simplexe dans \(\mathbb{R}^{2}: \hat{K}=\left\{x, y \in \mathbb{R}_{+}^{2}, \quad x+y \leqslant 1\right\}\)
Coordonnées barycentriques: \(A_{1}=(0,0), A_{2}=(1,0), A_{3}=(0,1)\)
\[(x, y)=\lambda_{1}(x, y) A_{1}+\lambda_{2}(x, y) A_{2}+\lambda_{3}(x, y) A_{3}\]
avec \(\lambda_{1}(x, y)=1-(x+y), \lambda_{2}(x, y)=x, \lambda_{3}(x, y)=y\)
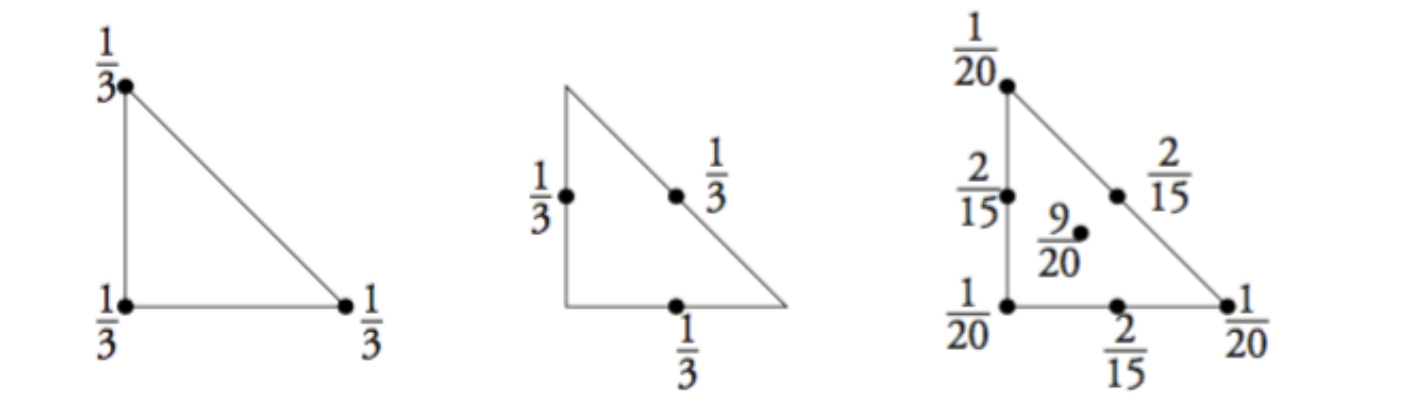
Formule de quadrature
\(n\) | ordre | coord. barycentrique | multiplicité | poids |
3 | 1 | \((1,0,0)\) | 3 | \(1 / 3 \times S\) |
3 | 2 | \((1 / 2,1 / 2,0)\) | 3 | \(1 / 3 \times S\) |
7 | 3 | \((1 / 3,1 / 3,1 / 3)\) | 1 | \(9 / 20 \times S\) |
\((1 / 2,1 / 2,0)\) | 3 | \(2 / 15 \times S\) | ||
\((1,0,0)\) | 3 | \(1 / 20 \times S\) |
Multiplicité
- Definition
Dans le tableau précédent, nous appelons multiplicité le nombre de permutations qui doivent être effectuées sur les coordonnées barycentriques pour obtenir la liste de tous les points de la quadrature.
- Exemple
La formule du premier ordre comporte 3 points ; les coordonnées barycentriques et les poids correspondants sont
\[\{1,1,0;1 / 3 \times S \}, \{0,1,1;1 / 3 \times S \}, \{1,0,1;1 / 3 \times S \}\]
Algorithme d’assemblage
- Données
on stocke les poids de quadrature dans un tableau poids. On stocke les valeurs des fonctions de formes et de son gradient aux points de quadrature dans les tableaux
psietderpsi.
# Boucle sur les elements
for ik in range ( Nel ):
compute ( detTK )
compute ( nabla_TK -1)
# Boucle sur les points de quadrature
for l in range ( nq ):
# Boucle sur les fonctions de formes
for ni in range ( nk ):
i = connect (ik , ni )
for nj in range ( nk ):
j = connect (ik , nj )
derpsii = derpsi [ ni ,l ] * nabla_TK -1
derpsij = derpsi [ nj ,l ] * nabla_TK -1
A[i ,j] += detTK * poids [l ] * derpsii @ derpsij| Même algorithme pour le calcul du second membre. |
Conditions de Dirichlet
- Conditions de type Dirichlet
fonctions de bases associés aux noeuds des bords à retirer
En pratique, pour ne pas modifier la taille de la matrice en fonction des conditions aux limites, on assemble la matrice avec tous les noeuds y compris ceux du bord
Méthode d’élimination
Méthode de pénalisation
Méthode de Nitsche, voir les explication ici
Méthode d’élimination
on modifie les lignes associés aux noeuds du bord. On met les lignes à 0 sauf 1 sur la diagonale et la valeur de la condition au second membre. On écrit simplement ce que valent les degré de liberté aux bords Dirichlet.
| Afin d’avoir une matrice symétrique on peut aussi modifier les colonnes correspondantes et le second membre. Cependant ce n’est pas nécessaire de le faire, le gradient conjugué, par exemple, n’est pas impacté par cette modification(on peut le montrer). |
Méthode de pénalisation
on modifie la matrice avec \(\varepsilon> 0\) ainsi
\[\begin{array}{l}
A_{i, i} \leftarrow A_{i, i}+\frac{1}{\varepsilon} \\
f_{i} \leftarrow f_{i}+\frac{1}{\varepsilon} g_{i}
\end{array}\]
Discussions
Algorithme élimination
for i in dir_nodes:
# acces ligne i de la matrice A et du vecteur F
A[i,:] = 0 #mettre `a zero la ligne correspondant
A[i,i] = 1 # 1 sur la diagonale de la matrice
F[i] = 10 # mettre la valeur de la solutionavec ce code u[i] = 10, i in dir_nodes.
Deux facons de faire pour le calcul de la norme \(L^2\) et de la norme \(H^1\):
calcul des intégrales directement
calcul via les matrices
Norme \(L^2\)
Ppur une fonction \(u_h\) dans un espace élément fini
\[\| u_h = \sum u_i \phi_i \|_2^2 =\int_\Omega u_h*u_h \approx \\
\sum_K \sum_{q=1}^Q w_q u_h \circ T_K (\hat{x}_q)*u_h \circ T_K (\hat{x}_q) |det \nabla T_K | \\
u_h\circ T_K (\hat{x}_q)= \sum_{i=1}^3 u_{connect(K,i)} \phi_i(\hat{x_q})\]
| choisir une formule de quadrature d’ordre \(2k\) pour \(u_h \in P^k_{c,h}\) |
Norme \(L^2\) (suite)
Pour une fonction \(u\) qui n’est pas dans un espace élément fini, on a:
\[\|u \|_2^2 =\int_\Omega u*u \approx,\quad
\sum_K \sum_{q=1}^Q w_q u \circ T_K (\hat{x}_q)*u \circ T_K (\hat{x}_q) |det \nabla T_K | \\\]
| il faut calculer \(x_{K,q}=T_K(\hat{x}_q)\), puis calculer \(u(x_{K,q})\). |
SemiNorme \(H^1\)
\[\|\nabla u_h = \sum u_i \nabla \phi_i \|^2_2 =\int_\Omega \nabla u_h \cdot \nabla u_h = \\
\sum_K \int_\hat{K} \nabla u_h \circ T_K \cdot \nabla u_h \circ T_K |det \nabla T_K | = \\
\sum_K \int_\hat{K} \hat{\nabla} u_h \nabla T_{K}^{-T} \cdot \hat{\nabla} u_h \nabla T_{K}^{-T} |det \nabla T_K | \approx \\
\sum_K \sum_{q=1}^Q w_q \hat{\nabla} u_h \nabla T_{K}^{-T} * \hat{\nabla} u_h \nabla T_{K}^{-T} |det \nabla T_K | \\
\hat{\nabla} u_h = \sum_{i=1}^3 u_{connect(K,i)} \hat{\nabla} \phi_i,\quad
\nabla u_{h_|K} = \sum_{i=1}^3 u_{connect(K,i)} \hat{\nabla} \phi_i \nabla T_{K}^{-T}\]
SemiNorme \(H^1\) (suite)
Si \(u\) quelconque, soit on calcule l’interpolant de \(u\), \(\pi^1_h u\), dans \(P^1_{c,h}\) puis la semi norme \(H^1\) en utilisant l’interpolant, soit on connait le gradient de \(u\) et on utilise celui ci dans les formules de quadratures
\[\pi^1_h u (x_j) = \sum_{i=1}^N u(x_j) \psi_i(x_j) = u(x_j) * \delta_{i,j} = u(x_j)\\\]
\(\pi^1_h u \) est l’élément de \(P^1_{c,h}\) dont les composantes sont \((u(x_1),\ldots,u(x_N)))^T\).
# nodes renvoit une paire (i,(x,y))
for N in nodes:
Piu[N.i] = fonction_u(N.x,N.y)Assemblage des matrices de raideur
\(A\) avec condition de dirichlet.
on assemble \(A\) sans condition Dirichlet.
\[\|\nabla u_h \|^2 = U_h^T A U_h = \int_\Omega \nabla u_h \cdot \nabla u_h\\
u_h = \sum_{i=1} U_i \psi_i(x)\]
avec \(U_h\) le vecteur des composantes de \(u_h\) dans la base de Lagrange \(P^1\).
Assemblage des matrices de raideur (suite)
Pour \(u\) on a
\[\|\nabla u \|^2 \approx \|\nabla \pi^1_h u \|^2 = \Pi_h^T A \Pi_h = \int_\Omega \nabla \pi^1_h u \cdot \nabla \pi^1_h u,\quad \mbox{ avec } \pi^1_h u = \sum_{i=1} u(x_i) \psi_i(x)\]
avec \(\Pi_h\) le vecteur des composantes de \(\pi^1_h u\) dans la base de Lagrange \(P^1\).