 .pdf
.pdf
Specx
SPECX is an innovative task-based programming model designed to address the challenges of modern high-performance computing (HPC). In a context where computing power and efficiency are paramount, SPECX is positioned as a leading solution to optimize the performance of complex parallel applications. This open-source framework offers developers and researchers a powerful tool to fully exploit the potential of advanced computing architectures. SPECX facilitates the creation and management of asynchronous tasks, enabling more efficient use of available computing resources, whether multi-core processors, clusters or supercomputers.
SPECX is a task-based execution system. It shares many similarities with StarPU but is written in modern C++. It also supports speculative execution, which is the ability to run tasks ahead of time if others are unsure about changing the data.
SPECX’s key features include:
-
A task-based approach to simplify parallel programming.
-
Automatic management of dependencies between tasks.
-
Asynchronous execution to maximize resource utilization.
-
Compatibility with various HPC environments.
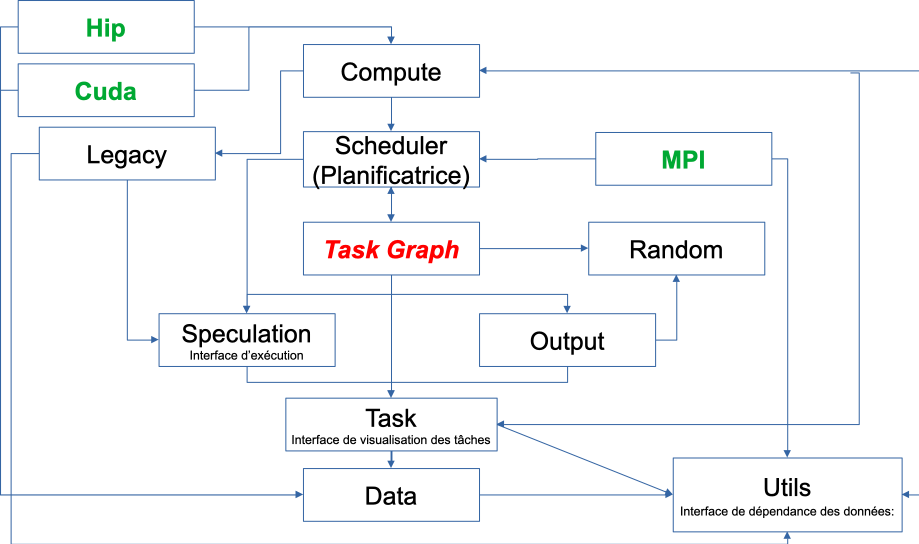
1. Workflow
-
Execution interface: Provides functionality for creating tasks, task graphs and generating traces. Can be used to specify speculation model
-
Data Dependency Interface: Forms a collection of objects that can be used to express data dependencies. Also provides wrapper objects that can be used to specify whether a given callable should be considered CPU or GPU code
-
Task visualization interface: Specifies the ways to interact with the task object.
1.1. Runtime interface
Runtime functionality is exposed through a class called SpRuntime . This class provides functionality for creating tasks, task graphs, and generating traces.
The SpRuntime class is modeled on a non-type parameter which can be used to specify the speculation model you want to use. This parameter can take one of three values (we currently support three different speculation models) defined in SpSpeculativeModel.hpp . By default, the runtime uses the first speculation model. Main SpRuntime methods: SpRuntime(const inNumThreads)
Currently, each instance of SpRuntime has its own thread pool to distribute its work on. In the future, we plan to separate thread management from execution. The runtime constructor takes as a parameter the number of threads it must spawn. By default , the parameter is initialized to the number indicated by the OMP_NUM_THREADS environment variable. If the environment variable is not set, the setting defaults to the number of concurrent threads supported by the hardware. The constructor spawns the new threads. At this time, we do not allow manual binding of threads to cores.
For now, the runtime will bind threads to cores by thread index if the OMP_PROC_BIND environment variable is set to TRUE (or true or 1 ) or if inNumThreads is less than or equal to the number of concurrent threads supported by the material.
autotask([optional] SpPriority inPriority, [optional] SpProbability inProbability, [optional] <DataDependencyTy> ddo..., <CallableTy> c) (1)
autotask([optional] SpPriority inPriority, [optional] SpProbability inProbability, [optional] <DataDependencyTy> ddo..., SpCpuCode(<CallableTy> c1), [optional] SpGpuCode(<CallableTy> c2)) (2)
This method creates a new task and injects it into the runtime. It returns an object representing the newly created task.
inPriority parameter specifies a priority for the task.
inProbability parameter is an object used to specify the probability with which the task can write to its writeable data dependencies.
After the inProbability parameter is a list of data dependency objects. This list declares the task’s data dependencies. At this time we only allow one type of data dependency to be declared for a given data item and a data dependency declaration of a certain type for a particular data item should only appear once times, except for atomic read and write dependencies.
For example, you cannot have a read and write dependency for the same data item (in this case, you should only declare the strongest type of dependency which is write). The validity of dependencies is checked at runtime. If you declared two data dependencies on different expressions but evaluated on the same data item, the program will exit.
The last or two last arguments (depending on which overload the call resolves to) specifies (a) callable(s) embedding the code the task should execute. Callables can be lambda expressions or functors. The callable’s function call operator must have as many parameters as there are data dependency objects in the data dependency object list. All parameters must be of lvalue reference type, and the type of each parameter must be the same as the data item of the corresponding data dependency object in the data dependency object list (you can also type infer the type with auto). Parameters must appear in the same order as they appear in the data dependency list.
Example:
Type1 v1;
Type2 v2;
runtime. task ( SpRead(v1), SpWrite(v2),
[] (const Type1 ¶mV1, Type2 ¶mV2)
{
if(paramV1.test()) { paramV2.set(1); } else { paramV2.set(2);}
}
);
Parameters corresponding to an SpRead data dependency object must be declared const (paramV1 in the example given above). The code inside the callable should refer to the parameter names rather than the original variable names. In the example given above, the code in the lambda body references the names paramV1 and paramV2 to refer to the data values v1 and v2 rather than v1 and v2. You should not capture v1 and v2 by reference and work with v1 and v2 directly. However, you can capture any variable that does not appear in the data dependency list and work with it directly. The runtime will store the addresses of the data items appearing in the data dependency list and take care of calling the callable with the appropriate matching arguments. In the example given above, assuming the task call is the only task call in the entire program, the runtime will take the addresses of v1 and v2 (since those are the data items that appear in the data dependency list) and when the task runs it will call the lambda with the arguments *v1 and *v2. Note that since Specx is a speculative task-based runtime system, there will also be times when the callable is called with copies of the data items (sampled at different times) rather than the original data items.
Callables for normal tasks can return any value. Callables for potential tasks must all return a boolean, however. This boolean is used to inform the runtime whether the task has written to its data dependencies may write or not. The callable’s code should correctly return true or false depending on the situation. It should return true if the task has written to its data dependencies maybe write and false otherwise.
In overload (1), the callable is passed as is to the task call. It will be implicitly interpreted by the runtime as CPU code. In overload (2), the callable c1 is explicitly labeled as CPU code by being wrapped in an SpCpuCode object (see the subsection on callable wrapper objects in the Data Dependency Interface section below). Overload (2) further allows the user to provide a GPU version of the code (in this case the callable must be wrapped in an SpGpuCode object). When the CPU and GPU versions of the code are provided, the Specx runtime will decide at runtime which of the two to run.
void setSpeculationTest(std::function<bool(int,const SpProbability&)> inFormula)
This method defines a predicate function that will be called by the runtime whenever a speculative task is ready to be placed in the task ready queue (i.e. all its data dependencies are ready ). The predicate is used to decide, based on runtime information, whether the speculative task as well as any of its dependent speculative tasks should be allowed to run. The predicate returns a boolean. A return value of true means that the speculative task and all of its dependent speculative tasks are allowed to run. Conversely, a return value of false means that the speculative task and all of its dependent speculative tasks should be disabled.
Note that although a speculative task may be allowed to run, this does not necessarily mean that it will actually run. For a speculative task to actually execute all of the parent speculations it speculates on, they must not have failed. It may be that between the time the speculative task has been marked as allowed to run and the time it is actually picked up by a thread for execution, some of the parent speculations have failed and therefore it will not be executed even though it was allowed to run depending on the result of the predicate evaluation in the past.
The two predicate arguments are provided by the runtime. The first parameter is the number of tasks that were in the ready queue when the predicate was called. The second parameter is a probability whose value is the average of all probabilities of all speculative tasks dependent on the speculative task for which the predicate is called and the probability of the speculative task for which the predicate is called. Based on these two parameters, one can write his own custom logic to enable/disable speculative tasks. For example, you can decide to deactivate a speculative task if the average probability exceeds a certain threshold (because it may not make much sense to continue speculating if the chances of failure are high). The prototype of the predicate might change in the future as we might want to consider additional or different data to make the decision.
If no speculation test is defined in the runtime, the default behavior is that a speculative task and all its dependent speculative tasks will only be activated if, at the time the predicate is called, no other task is ready to run.
void waitAllTasks()
This method is a blocking call that waits for all tasks that have been pushed to run up to this point to complete.
void waitRemain(const long int windowSize)
This method is a blocking call that waits for the number of unprocessed tasks to become less than or equal to windowSize.
void stopAllThreads()
This method is a blocking call that causes execution threads to close. The method expects all tasks to have already completed, so you should always call waitAllTasks() before calling this method.
int getNbThreads()
This method returns the size of the execution thread pool (in number of threads).
void generateDot(const std::string& outputFilename, bool printAccesses)
This method will generate the task graph corresponding to the execution in point format. It will write its output to the outputFilename path. The boolean printAccesses can be set to true if you want to print the tasks memory accesses (only the memory accesses specified in their data dependency list will be printed) in the tasks node body. By default, printAccesses is set to false.
The names of the tasks will be printed in the nodes of the graph. The default name will be displayed for each task unless another name has been manually defined by the user (see Task Viewer Interface section below). Speculative versions of tasks will have an apostrophe appended to their name. You can view the task graph in pdf format using the following command:
dot -Tpdf -o <pdf_output_filename> <path_to_dot_output_file>
The generateDot method should be called after calling waitAllTasks() and stopAllThreads().
void generateTrace(const std::string& outputFilename, const bool showDependencies)
This method will generate a trace of the execution (with timings and dependencies) in svg format. The generateTrace method should only be called after calling waitAllTasks() and stopAllThreads().
1.2. Data dependency interface
The data dependency interface forms a collection of objects that can be used to express data dependencies. It also provides wrapper objects that can be used to specify whether a given callable should be considered CPU or GPU code. The class definition for these objects is in Src/Utils/SpModes.hpp .
Data dependency objects
Specifying data dependencies amounts to constructing the relevant data dependency objects from the data lvalues.
Scalar data
SpRead(x): Specifies a read dependency on x. Read requests are always satisfied by default, i.e. a read request rr2 on data x immediately following another read request rr1 on data x need not wait until rr1 be satisfied to be served. Several successive read accesses will be performed in any order and/or at the same time. Reads are ordered by the runtime with respect to writes, maybe writes, commutative writes, and atomic writes. The order is the order in which data accesses were requested at runtime.
SpWrite(x): Specifies a write dependency on x indicating that data x will be written with 100% certainty. Several successive write requests on given data x will be satisfied one after the other in the order in which they were issued during execution. Writes are categorized by the runtime into reads, writes, maybe writes, commutative writes, and atomic writes. The order is the order in which data accesses were requested at runtime.
*SpMaybeWrite(x): Specifies a possibly writeable dependency indicating that data x can be written, i.e. it will not always be the case (writes can occur with some probability). Several possibly successive write requests on given data x will be satisfied one after the other in the order in which they were issued at runtime. Maybe writes are categorized by the runtime into reads, writes, maybe writes, commutative writes, and atomic writes. The order is the order in which data accesses were requested at runtime.
SpCommutativeWrite(x): Specifies a commutative write dependency on x, ie writes that can be performed in any order. Several successive commutative write requests will be satisfied one after the other in any order: while a commutative write request cw1 on data x is currently being processed, all immediately following commutative write requests on data x given x will be put on hold. When cw1 is released, one of the immediately following commutative write requests will be serviced. No order is applied by the runtime as to which one will be served next. For example, if two commutative tasks write to data x, the runtime does not impose an order as to which tasks should write first. However, the two tasks will not be able to run in parallel: while one of the two tasks is running and writing to data x, the other task will not be able to run because its write dependency request commutative will not be processed until the first task has finished executing and has released its commutative write dependency on x. Commutative writes are classified by the runtime into reads, writes, maybe writes, and atomic writes. The order is the order in which data accesses were requested at runtime.
SpAtomicWrite(x):Specifies an atomic write dependency on x. Atomic write requests are always satisfied by default, i.e. an awr2 atomic write request on data x immediately following another awr1 atomic write request on data x does not have need to wait for awr1 to be satisfied to be served. Several successive atomic writes will be performed in any order. For example, if two tasks write atomically to the data x, the runtime does not impose an order as to which tasks should write atomically first and the two tasks can run in parallel. Atomic writes will be committed to memory in the order in which they will be committed at runtime, the point is that the Specx runtime does not impose an order on atomic writes. Atomic writes are classified by the runtime into reads, writes, maybe writes, and commutative writes. The order is the order in which data accesses were requested at runtime. All data dependency constructors for scalar data must receive an lvalue as an argument.
Non-scalar data
We also provide analogous constructors for aggregating data values from arrays:
SpReadArray(<XTy> *x, <ViewTy> view)
SpWriteArray(<XTy> *x, view<ViewTy>)
SpMaybeWriteArray(<XTy> *x, <ViewTy> view)
SpCommutativeWriteArray(<XTy> *x, view<ViewTy>)
SpAtomicWriteArray(<XTy> *x, view <ViewTy>)
x must be a pointer to a contiguous buffer (the array).
view must be an object representing the collection of specific indices of array elements that are affected by the dependency. It must be iterable (in the "stl iterable" sense). An example implementation of such a view class can be found in Src/Utils/SpArrayView.hpp .
Wrapper objects for callables
We provide two wrapper objects for callables whose purpose is to mark up a callable to inform the runtime system whether to interpret the given callable as CPU or GPU code:
SpCpuCode(<CallableTy> c)
Specifies that the callable c represents CPU code.
SpGpuCode(<CallableTy> c)
Specifies that the callable c represents GPU code.
In both cases, the callable c can be a lambda or an lvalue or rvalue functor.
A callable that appears as an argument to a call to the task method of an SpRuntime object without being wrapped in one of the above two objects will be interpreted by the runtime as CPU code by default.
1.3. Task visualization interface
The Task Viewer interface specifies ways to interact with the task object returned by SpRuntime’s task method. The exact type returned by SpRuntime’s task method doesn’t matter and in practice it should be inferred from the (auto) type in your programs. You can, however, find the definition of the returned type in Src/Tasks/SpAbstractTask.hpp .
Main methods available on task objects returned by task calls
bool isOver() // Returns true if the task has finished executing.
Void wait() //This method is a blocking call that waits for the task to complete.
<ReturnType> getValue() // This method is a blocking call that retrieves the task's result value (if it has any). It first waits for the task to complete and then retrieves the result value.
void setTaskName(const std::string& inTaskName) // Assign the name inTaskName to the task. This change will be reflected in debug printouts, task graph, and trace generation output. By default, the task will be named as the dismembered string of the typeid name of the task's callable.
std::string getTaskName() // Get the task name. Speculative versions of tasks will have an apostrophe appended to their name.
GPU/CUDA (work in progress)
The CMake variable SPECX_COMPILE_WITH_CUDA must be set to ON, for example with the command cmake .. -DSPECX_COMPILE_WITH_CUDA=ON . If CMake is unable to find nvcc, set the CUDACXX environment variable or the CMake variable CMAKE_CUDA_COMPILER to the path to nvcc. You can define CMAKE_CUDA_ARCHITECTURES to select the CUDA sm to compile.
Here is an example job on CUDA GPU:
tg.task(SpWrite(a),// Dependencies are expressed as usual
SpCuda([](SpDeviceDataView<std::vector<int>> paramA) { // Each
parameter is converted into a SpDeviceDataView
// The kernel call is called using the dedicated stream
inc_var<<<1,1,0,SpCudaUtils::GetCurrentStream()>>>
(paramA.array(),paramA.nbElements());
}));
Currently, the call to a CUDA kernel must be done in a .cu file. There are three types of SpDeviceDataView that provide different methods: one for is_trivially_copyable objects, one for std::vectors of is_trivially_copyable objects, and one user-customized. At the latest, it is requested to provide the following methods:
std::size_t memmovNeededSize() const{...}
pattern <DeviceMemmov class>
void memmovHostToDevice(DeviceMemmov& mover, void* devicePtr,
std::size_t size){...}
pattern <DeviceMemmov class>
void memmovDeviceToHost(DeviceMemmov& mover, void* devicePtr,
std::size_t size){...}
self getDeviceDataDescription() const{...}
The type returned by getDeviceDataDescription must be copyable and have an empty constructor. It should be used to help retrieve raw pointer data when calling a device kernel.
GPU/HIP (work in progress)
The CMake variable SPECX_COMPILE_WITH_HIP must be set to ON, for example with the command cmake .. -DSPECX_COMPILE_WITH_HIP=ON . The C++ compiler must also be defined with for example CXX=hipcc , so a working command line must be CXX=hipcc cmake .. -DSPECX_COMPILE_WITH_HIP=ON . You can set GPU_TARGETS to select the HIP sm to compile.
Here is an example of a task on a HIP GPU:
tg.task(SpWrite(a),// Dependencies are expressed as usual
SpHip([](SpDeviceDataView<std::vector<int>> paramA) { // Each parameter
is converted into a SpDeviceDataView
// The kernel call is called using the dedicated stream
inc_var<<<1,1,0,SpHipUtils::GetCurrentStream()>>>(paramA.array(),
paramA.nbElements());
})
);
Currently, the call to a HIP kernel must be done in a .cu file. There are three types of SpDeviceDataView that provide different methods: one for is_trivially_copyable objects, one for std::vectors of is_trivially_copyable objects, and one user-customized. At the latest, it is requested to provide the following methods:
std::size_t memmovNeededSize() const{...}
pattern <DeviceMemmov class>
void memmovHostToDevice(DeviceMemmov& mover, void* devicePtr,
std::size_t size){...}
pattern <DeviceMemmov class>
void memmovDeviceToHost(DeviceMemmov& mover, void* devicePtr,
std::size_t size){...}
self getDeviceDataDescription() const{
...
}
The type returned by getDeviceDataDescription must be copyable and have an empty constructor. It should be used to help retrieve raw pointer data when calling a device kernel.
MPI
The CMake variable SPECX_COMPILE_WITH_MPI must be set to ON, for example with the command cmake .. -DSPECX_COMPILE_WITH_MPI=ON .
Data serialization and deserialization
Data can be sent to target MPI processes using the mpiSend and mpiRecv methods of the SpTaskGraph object.
To be moved between compute nodes, objects must be one of the following types:
-
Be an instance of a class that inherits from SpAbstractSerializable
-
Supports getRawDataSize , getRawData and restoreRawData methods, which will be used to extract the data to send and restore it.
-
Be a POD type (well, having is_standard_layout_v and is_trivial_v returning true, which means having a pointer in a structure won’t be detected and could be a problem).
-
Let be a vector of the types defined in 1, 2 or 3. It is the SpGetSerializationType function that performs the detection and assigns the corresponding SpSerializationType value to each object. Detection is carried out in the order written above.
For examples, see the unit tests under UTests/MPI.
Type 3 - PODs
For built-in and POD types, these methods work automatically:
SpTaskGraph<SpSpeculativeModel::SP_NO_SPEC> tg; int a = 1; integer b = 0; ... tg.mpiSend(b, 1, 0); tg.mpiRecv(b, 1, 1);
Type 1 - SpAbstractSerializable
However, user-defined types must allow support for MPI serialization and deserialization. To do this, they must implement these steps.
-
Include "MPI/SpSerializer.hpp"
-
Make the class a public subclass of the SpAbstractSerializable class
-
Provide a constructor that takes as an argument a non-constant reference to SpDeserializer. This constructor makes it possible to construct an object of the class from deserialization.
-
Provide a public "serialize" method with a non-const reference to SpSerializer as an argument. This method serializes the object into the SpSerializer input object.