 .pdf
.pdf
Modeling and simulation of contact in micro-swimming
University of Strasbourg
Master 2 CSMI
2021-2022
Supervisors: Luca Berti, Laetitia Giraldi, Christophe Prud'homme
1. General context
Fluid flows laden with many solid particles of arbitrary shape are common in industrial processes, such as in applications in geophysics or oceanography [CollisionModel_DNS], [Wan_Turek]. Inter-particle interactions become important when the particle volume is high. These collisions between particles give further complexity to the fluid-particle interaction problem. In recent years, various efficient numerical methods to simulate fluid domain-particle and particle-particle interactions have been developed, and different collision models are proposed in literature.
These models can be classified into two main groups: lubrication models and direct contact models. The first type consists of a lubrication force applied to a particle when it is close to either a second particle or the boundary of the fluid domain. This lubrication force can be used to avoid direct contact between surfaces or can be combined with a contact model to account for hydrodynamic forces, which are not resolved implicitly when the distance between surfaces is very small. There are several approaches to define these lubrication models, such as spring models, repulsive models or constant force models [Glowinski], [CollisionModel_DNS]. The direct contact force applies when two surfaces interact at a common point. This direct contact is often treated with a very small collision-time which implies that the position and orientation of the particles remain unchanged, and the contact force will only modify their velocity, as it is the case for the hard-sphere approach [CollisionModel_DNS]. Another type of approach is the soft-sphere approach [Softmodel].
In this report we will detail two lubrication forces and one direct contact model. In addition, we will implement and validate one lubrication model, using various test cases from the literature.
This page is organized as follows: Section Introduction details the objectives, the roadmap, the perspectives, the conclusion, and an overview of the presentations given. The resolution of the fluid models, including the stationary and unsteady Stokes problem and the Navier-Stokes equations, is described in the section Fluid models. Section Fluid-body interaction summarizes the mathematical aspects of the fluid-body interaction, as well as fluid-body simulations, in particular for isolated bodies and the three-sphere planar swimmer. The theoretical framework for interactions between bodies in incompressible Newtonian fluids is given in section Collision models. The approaches are implemented and validated with test cases from literature. Finally, the Bibliography section lists the articles and documents used, and provides access to PDFs.
2. Company presentation
The project is realized by the Cemosis center [Cemosis] in collaboration with the Inria institute [Inria].
Cemosis, created in 2013, is the Modeling and Simulation Center in Strasbourg. It is hosted by the Institute for Advanced Mathematical Research. The team includes researchers in mathematics and engineers in the field of modeling, simulation, optimization and high performance computing. The main objective of Cemosis is to develop and apply competences around two fields: mathematical modeling and simulation. For this, Cemosis promotes different projects based on these two fields. These projects are either interdisciplinary academic projects or collaborations with companies. Depending on the availability of the models and of the necessary software tools, the projects can last several months, or even more than three years, if neither the models nor the methods and software are available.

The National Institute for Research in Digital Science and Technology, Inria, was founded in 1967. Inria is organized into several autonomous research centers mainly located in France. The missions of these centers are to perform applied research and technological developments as well as to maintain national and international scientific exchanges. Most projects are carried out in collaboration with other research centers or universities. These projects, focused on a wide range of fields such as health, transport or energy, show support for the versatility of innovation.
3. Objectives and roadmap
The objectives of this internship can be separated in two main parts: the modeling of collision and the implementation of these models.
The first part includes the modeling of different components of the fluid-body interaction, i.e. the Stokes equations, the Navier-Stokes equations, the coupling equations and the Newton equations describing the dynamics of the bodies. Each component is described using its variational equation. From the latter, we implement the numerical resolution of a part of these equations using the Feel++ library, written in C++. We detail the main methods of the implementation and verify it with test cases. This part allows, on one hand, to understand the theory of fluid-body interaction and, on the other hand, to get familiar with the methods of Feel++. In addition, this part consists in analyzing and summarizing different approaches of collision models from the literature.
The goal of the second part is to implement these collision models in the Python layer of the fluid toolbox, to validate the implementation with test cases and to realize other simulations and applications. For that we first consider rigid bodies of spherical shape, then arbitrary and articulated bodies and finally deformable bodies. An important task is to optimize the algorithms using different tools.
Finally, the internship includes other tasks that are not directly related to the modeling and simulation of contact. In particular, a study of the motion of the three-sphere planar swimmer. In addition, we intend to write a paper on the results and applications shown in this report.
The initial roadmap of these objectives is given by the following Gantt chart:
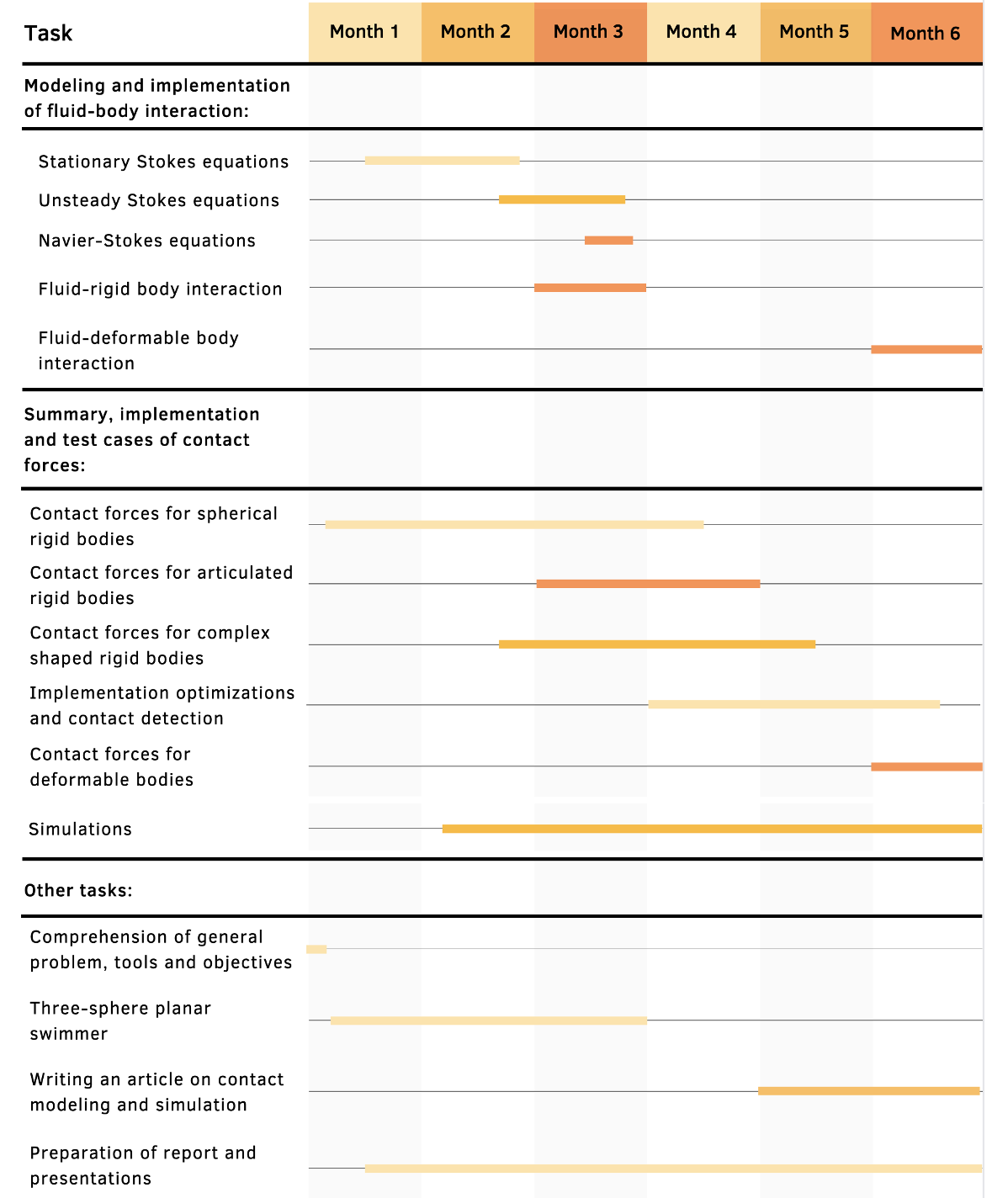
The final roadmap is close to the initial roadmap. All the tasks concerning the rigid bodies have been completed. However, we did not consider deformable bodies. At the end of the internship, we were interested in other applications allowing on the one hand to optimize the implementation, by using parallelization, and on the other hand to generalize the simulations, by developing a tool that allows to insert any object in a complex mesh.
4. Perspectives
The perspectives of the internship are grouped into two categories, the short-term and long-term perspectives.
Regarding the first category, a first objective is to write a paper that details the collision models analyzed during the internship, shows the results of different test cases, and describes the applications as well as the optimizations that we have developed. In addition to the test cases of this report, we want to present more simulations in three dimensions. Moreover, it will be necessary to optimize the algorithm used to create object in mesh geometries, in order to show this application in the paper. A second objective is to further analyze the behavior of the three-sphere swimmer near the wall, by modifying its initial orientation or its relative velocity. One could also consider other types of swimmers, such as the three-sphere planar swimmer.
Regarding the long-term perspectives, the main aim is to model the motion of deformable swimmers in complex environments. The dynamics of deformable objects are described by hyper-elastic equations and the coupling to model the interaction of the swimmer with the fluid must therefore be adapted. An example of such a complex environment are arteries. Since these are confined and contain rigid and deformable obstacles, it will be necessary to model the deformable body - deformable body and deformable body - rigid body interactions. Moreover, arteries transporting blood, the modeling of the swimmer motion requires to describe the non-Newtonian fluid dynamics using the Carreau-Yasuda laws. Once this motion is successfully simulated, an additional objective is to control it in order to determine the best swimming strategy according to the environment in which the swimmer is placed, using reinforcement learning. Thus, the swimmers will be able to pass through different biological environments, which will be of great utility in the medical field. These objectives are in line with those of my PhD starting in October (Micro swimming in complex environments) and of the NEMO project (controlliNg a magnEtic Micro-swimmer in cOnfined and complex environments).
5. Conclusion
In conclusion, we can state that we have developed generalized collision algorithms to simulate rigid body - rigid body and rigid body - boundary interactions. The algorithms can be used for any type of rigid body of convex shape. The collision models for concave bodies are more complex and are not treated in this report. Our results are consistent with those in the literature. The small differences that we observed for various test cases are explained by the use of different collision and numerical resolution models. Moreover, we have increased the efficiency of collision models using different tools, as the parallelization or the Fast marching method. Finally, we have successfully developed a first application, which allows creating bodies of arbitrary shape in complex meshed geometries.
6. Meeting presentations
Meeting |
Context |
Presentation |
\(07.03.2022\) |
Repulsion force to model the contact between spherical rigid bodies, implementation of Stokes equations and the three spheres planar swimmer. |
|
\(20.05.2022\) |
Repulsion force to model the contact between spherical, complex shaped and articulated rigid bodies, narrow band fast marching method and some simulation results. |
|
\(24.06.2022\) |
Collision model for ellipsoidal particles in viscous fluid. |
|
\(22.07.2022\) |
Collision model for spherical, arbitrary and articulated bodies, optimizations and applications, simulations results. |
Introduction references
-
[Cemosis] www.cemosis.fr.
-
[Inria] www.inria.fr/fr.
-
[CollisionModel_DNS] Ramandeep Jain, Silvio Tschisgale, Jochen Fröhlich (2019). A collision model for DNS with ellipsoidal particles in viscous fluid.
-
[Wan_Turek] Decheng Wan and Stefan Turek (2004). Direct Numerical Simulation of Particulate Flow via Multigrid FEM Techniques and the Fictitious Boundary Method. Download PDF
-
[CollisionModel_DNS] Ramandeep Jain, Silvio Tschisgale, Jochen Fröhlich (2019). A collision model for DNS with ellipsoidal particles in viscous fluid.
-
[Softmodel] M.N.Ardekani, P.Costa, W.P.Breugem, L.Brandt (2016). Numerical study of the sedimentation of spherical particles.
-
[Glowinski] R. Glowinski, T. W. Pan, T. I. Hesla, D. D. Joseph, and J. Périaux (2000). A Fictitious Domain Approach to the Direct Numerical Simulation of Incompressible Viscous Flow past Moving Rigid Bodies: Application to Particulate Flow. Download PDF