 .pdf
.pdf
Performance
As reconstruction of mesh from a point cloud is an hard operation to perform, the complexity of most algorithm able have a complexity of O(n³), The main objective of the KSR algorithm is to enhance perfomance by reducing the number of tiny cells responsible for small artifacts and more execution time and memory usage
As we look through the user manual of KSR package footnote:https://cgal.geometryfactory.com/CGAL/doc/master/Kinetic_surface_reconstruction/index.html[KSR] we have access to some test and the time requiered for each.
images::KSREXEMPLE.png[width=300]
With the following execution time :
Mesh |
meeting room |
Full thing |
Hilbert cube |
Kinetic shape detection |
37.1s |
8.6s |
0.6s |
Kinetic space partition |
93.4s |
238.8s |
10.5s |
Total Time |
131.1s |
248.2s |
11.1s |
There are some other operations that take time but are negligible compared to detection and partition. Since our focus is primarily on building meshes, we will compare our performance results with the meeting room execution time provided in the KSR user manual.
Initially, during our project earlier in the year we attempted to use the KSR algorithm directly with STL file data. and even if mesh like Three zones are really simple, the algorithme would not work. So we used software like cloodcompare to generate point cloud and as an outcome it would take some hours to generate a mesh with KSR algorithm with our personal computer. After that during the intership I mainly try everything using the super-computer Gaya.After working a bit to generate a good point cloud with good normals we could reduce the execution time by a lot
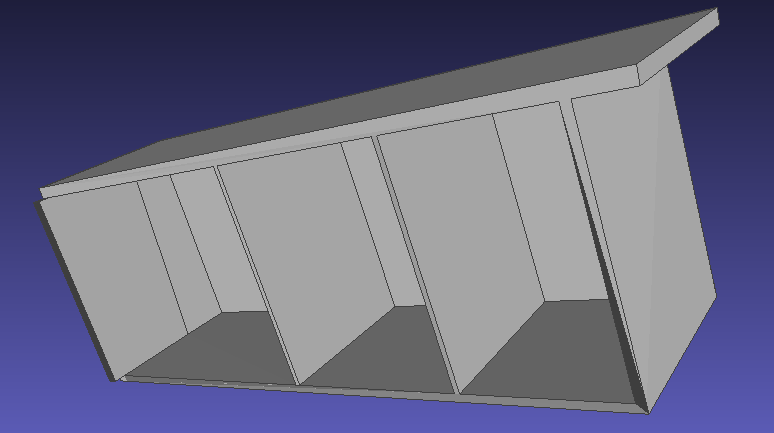
For this result the shape detection took 124s and the kinetic space partion 0.2s.When compare to the size and the complexity of the meeting room mesh, it kinda disapointing. But after this we decided to implemente the grid simplify function to unified the mesh.And so we could had way better result like
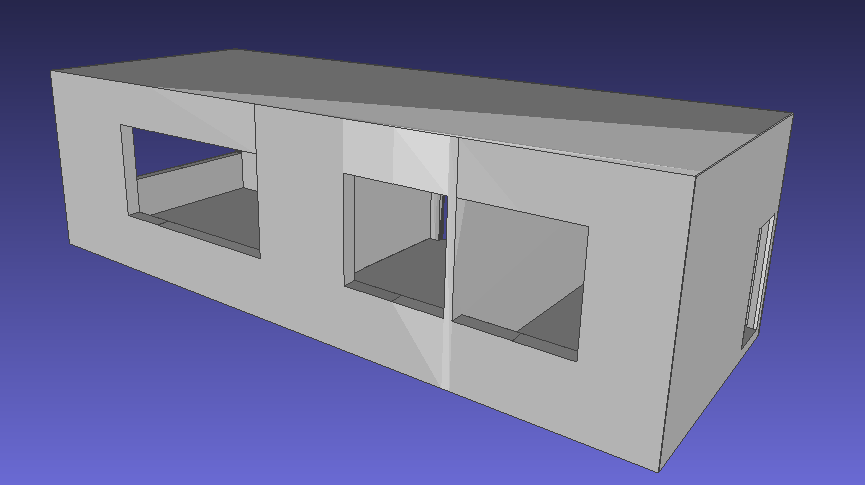
Execution time : 1.6s for shape detection and 1.1 for space partition
When using the KSR algorithm, two primary parameters significantly influence execution time: maximum.distance and min.region.size. Increasing or reducing each value would change the number and shape of detected shape. Adjusting these parameters can either speed up or slow down the process, depending on the desired level of detail and accuracy.
Parameters |
default : min.region.size=3847 ,maximum.distance=0.44 |
min.region.size=2000,maximum.distance=0.08 |
min.region.size=500,maximum.distance=0.08 |
min.region.size=100,maximum.distance=0.08 |
Shape detection |
7.97s |
8.18s |
5.76s |
1.62s |
Kinetic space partition |
0.22s |
0.22s |
0.36s |
1.35s |
total execution |
8.2s |
8.41s |
6.13s |
2.98s |
We can do the same for ACjasmin
Parameters |
default : min.region.size=7512,maximum.distance=0.49 |
min.region.size=3000,maximum.distance=0.08 |
min.region.size=2000,maximum.distance=0.08 |
min.region.size=1200,maximum.distance=0.06 |
Shape detection |
407s |
58s |
39.8s |
31.5s |
Kinetic space partition |
0.4s |
0.8s |
0.7s |
0.9s |
Total execution |
407.5s |
58.8s |
40s |
32.5s |
We can observe a significant reduction in execution time when we adjust the values of the parameters. The difference in output will be discussed in the section Result. This indicates that the execution time highly depends on selecting the most appropriate parameters for the desired outcome and the input mesh.
Additionally, our main includes other functions, such as the point cloud generator and exporter, which can impact the overall execution time. One of the significant issue when using the KSR algorithm is the unpredictability of the chosen parameters effectiveness.Moreover, improper parameter selection can lead to execution failures, such as segmentation faults.
Next Conclusion